Abstrak
Dengan berkembangnya Internet of Things, teknologi autentikasi biometrik menjadi krusial dalam membina masyarakat cerdas, yang menjamin keamanan informasi individu. Saat ini, sebagian besar perangkat penginderaan cerdas yang digunakan untuk pengenalan tulisan tangan offline dibatasi oleh kemampuan akuisisi informasinya, hanya mampu mencapai pengenalan klasifikasi konten tulisan tangan, verifikasi identitas, dengan kesulitan tertentu dalam pengenalan lintasan tulisan tangan. Sementara beberapa perangkat lantai cerdas dapat mencapai pengenalan lintasan, perangkat tersebut sering kali memerlukan sejumlah besar sensor. Generator piezoelektrik origami Kresling menawarkan keunggulan seperti perakitan yang mudah, kemampuan memberi daya sendiri, dan biaya rendah. Dengan memanfaatkan desain generator origami Kresling, kami mengusulkan dua jenis metamaterial origami yang dilengkapi dengan fungsi autentikasi biometrik dan pengenalan lintasan. Desain baru metamaterial origami ini meningkatkan jumlah saluran untuk akuisisi informasi, yang memungkinkan autentikasi biometrik yang tepat dan pemrosesan informasi multidimensi seperti sinyal lintasan, sambil menggunakan lebih sedikit sensor untuk mencapai pengenalan lintasan. Dengan menggabungkan metode pembelajaran mesin, metamaterial origami dapat secara efektif mengenali konten tulisan tangan, identitas penulis, dan lintasan tulisan. Studi ini mengusulkan pendekatan desain baru untuk autentikasi biometrik dan pengenalan lintasan menggunakan bahan mekanis tradisional, yang menunjukkan potensi signifikan di bidang interaksi manusia–komputer dan arsitektur pintar.
1 Pendahuluan
Dengan kemajuan Internet of Things (IoT), banyaknya perangkat pintar yang beragam telah menyediakan skenario penggunaan teknologi yang semakin bervariasi bagi individu, yang menimbulkan tantangan signifikan terhadap keamanan informasi pengguna. Mengenai keamanan informasi, perhatian utama berkisar pada verifikasi identitas pengguna. Berbagai jenis perangkat memerlukan teknologi autentikasi biometrik yang berbeda, seperti sidik jari, pengenalan wajah, sidik suara, dan pengenalan gaya berjalan [ 1 , 2 ]. Dalam proses autentikasi informasi, berbagai sensor memainkan peran penting, menentukan konten, resolusi, dan keakuratan informasi identifikasi.
Seiring dengan semakin mendalamnya penelitian tentang algoritma pembelajaran mesin, komputer memberdayakan material mekanis tradisional, yang memungkinkan bahkan struktur mekanis sederhana untuk berfungsi sebagai pembawa komputasi atau penginderaan [ 3 – 5 – 6 ]. Menggunakan material bertenaga mekanis sendiri sebagai perangkat penginderaan untuk pengenalan biometrik menawarkan keuntungan seperti pengoperasian yang stabil dan tahan lama. Dalam bidang bangunan pintar, memanfaatkan triboelectric nanogenerators (TENGs) [ 2 , 7 , 8 ] atau generator origami [ 9 , 10 ] untuk membuat lantai cerdas dapat mengubah energi mekanis dari langkah kaki orang menjadi listrik. Melalui analisis sinyal listrik oleh beberapa sensor, fungsionalitas seperti pengenalan gaya berjalan dan pelacakan lintasan dapat diwujudkan. Dalam hal interaksi manusia–komputer, tim Wang menerapkan TENGs untuk pengenalan tulisan tangan multibahasa [ 11 ], memanfaatkan sifat listrik spontan dan sensitivitas tinggi material untuk mencapai klasifikasi konten tertulis multibahasa dan identitas penulis, dengan tingkat akurasi 93,63% untuk klasifikasi angka Arab. Kulit elektro-optik yang dirancang oleh Li et al. dengan persepsi bertenaga triboelektrik mencapai akurasi tinggi sebesar 97,76% dalam pengenalan informasi tulisan tangan [ 12 ].
Saat ini, fungsi utama perangkat pengenalan tulisan tangan lain berdasarkan triboelektrik dan material mekanis serupa adalah klasifikasi konten tertulis dan identitas penulis [ 11 – 14 , 13 – 15 ]. Namun, informasi tulisan tangan tidak hanya mencakup konten simbolis dan informasi identitas tetapi juga detail penting seperti lintasan penulisan, kecepatan, akselerasi, dan tekanan. Karena pengenalan informasi tulisan tangan oleh perangkat pengenalan tulisan tangan triboelektrik nanogenerator terbatas pada informasi saluran tunggal, dimensionalitas informasi yang dapat ditransmisikan dibatasi, yang menyebabkan hilangnya beberapa informasi. Untuk mengatasi masalah hilangnya informasi saluran tunggal, pengenalan tulisan tangan multisaluran berdasarkan metamaterial origami muncul sebagai solusi yang layak.
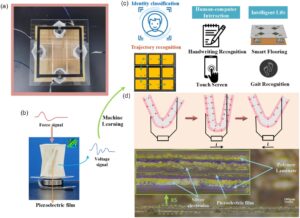
Origami, sebagai bentuk seni tradisional, telah menarik perhatian luas karena pola deformasi rumit yang dihasilkan dari pola lipatan lipatannya yang beragam. Dengan menyesuaikan berbagai parameter struktural metamaterial origami, berbagai sifat fisik unik seperti rasio Poisson negatif, multi-stabilitas, dan penguncian sendiri dapat dicapai. Jiang et al. telah mengubah kekakuan struktur origami dengan memanfaatkan origami Miura yang ditekuk secara aktif, memungkinkan persepsi taktil dalam lingkungan realitas virtual [ 16 ]. Lebih jauh lagi, menata ulang dan menggabungkan metamaterial origami dengan cara tertentu telah menghasilkan aplikasi representatif dalam bidang seperti komputasi mekanis [ 17 , 18 ], robotika biomimetik [ 19 – 21 – 22 ], dan teknik mesin [ 23 , 24 ]. Di antara ini, struktur origami Kresling menunjukkan karakteristik seperti kiralitas, kekakuan negatif, bistabilitas, dan kekakuan nonlinier [ 25 ]. Para peneliti telah menemukan aplikasi yang luas di beberapa area termasuk pemanenan energi [ 26 – 29 – 30 ] dan robotika lunak [ 20 , 31 , 32 ]. Huang dkk. menggabungkan struktur origami Kresling dengan film tipis piezoelektrik untuk mendesain generator origami Kresling [ 26 , 27 ] dan membuat model kopling elektromekanis yang relevan. Dengan menempelkan film piezoelektrik polivinilidena fluorida (PVDF) ke lipatan gunung origami, deformasi besar struktur origami diubah menjadi keluaran sinyal tegangan yang lebih tinggi. Berdasarkan ini, sensor gaya berjalan bertenaga sendiri dirancang untuk mencapai pemanenan energi dan pengenalan identitas gerakan kaki manusia. Dengan mengintegrasikan empat generator origami Kresling, skema pengenalan tulisan tangan piezoelektrik metamaterial origami empat saluran diusulkan (Gambar 1a ). Perangkat ini dapat mengubah sinyal tekanan selama menulis menjadi sinyal tegangan empat saluran, memberikan informasi posisi yang lebih akurat pada saat tertentu dibandingkan dengan sinyal tegangan tunggal. Fitur yang diekstraksi dari domain waktu dan domain frekuensi digunakan sebagai dataset pelatihan, dikombinasikan dengan algoritma support vector machine (SVM) untuk klasifikasi dan pengenalan [ 33 ]. Bahkan dengan data pelatihan yang terbatas, hasil pengenalan yang baik dicapai untuk konten tulisan tangan dan identitas sejumlah kecil pengguna.
Akan tetapi, biaya pelatihan menjadi sangat tinggi untuk sejumlah besar konten klasifikasi. Oleh karena itu, solusi pengoptimalan lebih lanjut diusulkan. Tanpa mengubah struktur metamaterial origami, area pengenalan dipetakan berdasarkan kemampuannya untuk mencerminkan posisi tulisan, mengubah masalah klasifikasi konten tulisan tangan menjadi pengenalan lintasan dan reproduksi titik petak yang dilacak. Hal ini secara signifikan meningkatkan konten yang dapat dikenali dengan penurunan volume data pelatihan. Dengan menganalisis respons mekanis dari dua jenis metamaterial origami pada posisi yang berbeda, alasan perbedaan pengenalan titik petak antara kedua jenis tersebut diberikan, bersama dengan penjelasan tentang perbedaan akurasi pengenalan lintasan.
Pendekatan desain metamaterial origami tersebut, dengan mengubah deformasi struktur origami menjadi sinyal listrik dan menggabungkannya dengan algoritma pembelajaran mesin, dapat secara akurat mengenali sinyal lintasan perangkat individual (Gambar 1b ). Ini tidak hanya memiliki prospek aplikasi di area seperti touchpad dan tablet tulis dalam interaksi manusia-komputer tetapi juga di bangunan pintar. Metamaterial origami, dibandingkan dengan lantai pintar tradisional, memiliki biaya produksi yang lebih rendah dan dapat menangkap energi mekanis yang dihasilkan oleh gerakan tekanan dan mengubahnya menjadi listrik, memungkinkan fungsionalitas seperti pelacakan lintasan dan pengenalan gaya berjalan [ 9 , 27 ] untuk entitas seperti satwa liar, robot, dan kendaraan transportasi.
2 Hasil
2.1 Generator Piezoelektrik Origami Kresling
Struktur generator piezoelektrik origami Kresling diilustrasikan pada Gambar 1c . Dalam penelitian ini, PVDF dipilih sebagai bahan kopling elektromekanis karena keunggulannya yang tak tergantikan dalam hal fleksibilitas, rentang respons frekuensi, dan kemampuan beradaptasi terhadap lingkungan. Dibandingkan dengan timbal zirkonat titanat (PZT), meskipun PVDF menunjukkan koefisien piezoelektrik yang lebih rendah (mathematical equationBahasa Indonesia: ≈ 26 pC/N), fleksibilitasnya yang unggul, dan karakteristiknya yang ringan (dengan kepadatan hanya seperempat dari PZT) lebih baik memenuhi persyaratan deformasi dinamis struktur origami Kresling. Bahan piezoelektrik ditempelkan di puncak titik tegangan tertinggi, yang terutama berfungsi untuk mengubah deformasi struktural menjadi sinyal listrik. Ketebalan total bahan piezoelektrik sekitar 130 μm, terdiri dari lima lapisan seperti yang digambarkan pada Gambar 1d . Dari lapisan luar ke dalam, ada dua lapisan film polipropilena yang berfungsi sebagai lapisan pelindung, dua lapisan film berlapis perak yang berfungsi sebagai lapisan elektroda, dan lapisan fungsional inti PVDF yang bertanggung jawab untuk konversi piezoelektrik. Setelah deformasi kompresi struktur Kresling, film piezoelektrik mengalami deformasi, yang mengarah pada pembentukan efek piezoelektrik positif dan fenomena polarisasi internal dalam lapisan PVDF (FDT1-028KW/ADH, Shenzhen Ameaning Intelligent Technology Co., Ltd).
Dalam hal pengenalan biometrik, kinerja keluaran sensor sangat memengaruhi kemanjuran pengenalan. Untuk menguji kinerja mekanis generator piezoelektrik origami Kresling, kami menyediakan keluaran mekanis dan elektrik dalam kondisi kompresi siklik melalui pemodelan mekanis, simulasi numerik, dan pengujian eksperimental. Parameter geometris struktur Kresling yang digunakan dalam bagian ini adalah sebagai berikut: jumlah tepi n = 6, sudut dasar α = 58,6°, panjang tepi atas a = 25 mm, modulus Young E = 15 MPa, dan ketebalan h = 1 mm. Struktur origami dibuat dengan cara menuang bahan TPU ke dalam cetakan cetak 3D. Partikel TPU dipanaskan dan dicairkan ke dalam cetakan. Setelah bahan TPU mengeras, origami Kresling dilepaskan dari cetakan. Bantalan yang dipasang di bawah generator origami Kresling adalah bantalan rol tirus dengan diameter dalam 15 mm dan diameter luar 42 mm. Kecuali dinyatakan lain, semua kalkulasi elemen hingga dan pemrosesan fisik mengadopsi set parameter desain ini untuk struktur Kresling.
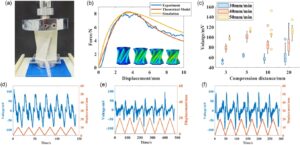
Melalui percobaan kompresi kuasi-statis, data kinerja mekanis dari masing-masing struktur origami Kresling dapat diperoleh. Gambar 2a mengilustrasikan pengaturan percobaan kompresi kuasi-statis. Sebuah struktur origami tunggal ditempatkan pada mesin uji material, dengan bantalan rol kerucut dipasang di bagian bawah untuk menghilangkan derajat kebebasan rotasi sepanjang arah kompresi. Untuk memaksimalkan pembangkitan sinyal listrik selama kompresi, berdasarkan hasil simulasi (Abaqus 2023), bagian tengah lipatan puncak tempat tegangan maksimum terjadi diidentifikasi sebagai lokasi optimal untuk menempelkan film piezoelektrik. Untuk memberikan gambaran yang lebih akurat tentang karakteristik mekanis generator origami untuk analisis selanjutnya, kami menggunakan pemodelan teoritis generator origami Kresling sebagai referensi [ 26 , 27 ].
Dari perspektif energi, gaya pendukung F selama kompresi dapat dinyatakan sebagai turunan dari total energi potensial elastis struktur terlipat E t terhadap jarak kompresi H
![]()
di mana total energi potensial elastis E t terdiri dari energi potensial elastis pada lipatan E tc , energi potensial elastis dalam lapisan piezoelektrikmathematical equation, dan energi potensial deformasi permukaan E vt
![]()
Energi potensial elastis pada lipatan dihitung menggunakan model engsel elastis, di mana n mewakili jumlah tepi di permukaan atas struktur Kresling,mathematical equationmewakili sudut dihedral pada lipatan bawah,mathematical equationmewakili sudut dihedral pada lipatan lembah,mathematical equationmewakili sudut dihedral pada lipatan gunung,mathematical equationmewakili sudut awal, danmathematical equationmelambangkan kekakuan lentur pada lipatan.
![]()
Dengan memperlakukan lapisan piezoelektrik sebagai bagian dari engsel lentur, energi potensial elastisnyamathematical equationdiberikan oleh, dimanamathematical equationadalah modulus Young dari bahan piezoelektrik,mathematical equationadalah panjang lapisan piezoelektrik,mathematical equationadalah ketebalan lapisan piezoelektrik,mathematical equationadalah ketebalan lipatan,mathematical equationadalah koefisien kopling elektromekanis, danmathematical equationadalah tegangan yang dihasilkan oleh lapisan piezoelektrik.
![]()
Perhitungan langsung energi potensial deformasi permukaanmathematical equationadalah kompleks; oleh karena itu, deformasi struktur lipatan selama kompresi disederhanakan menjadi model pegas linier di lipatan lembah, di manamathematical equationmewakili modulus elastisitas selama perluasan lipatan lembah,mathematical equationmewakili panjang awal lipatan lembah, danmathematical equationmenunjukkan jarak antara titik akhir lipatan lembah setelah deformasi.
![]()
Gambar 2b menggambarkan kurva gaya-perpindahan yang diperoleh dari kompresi kuasi-statis pada kecepatan 50 mm/menit, yang menunjukkan bahwa model teoritis mendekati hasil eksperimen jika dibandingkan dengan hasil simulasi. Selama kompresi kuasi-statis, gaya pendukung yang diberikan oleh struktur origami Kresling awalnya meningkat secara linear, mencapai puncak 8 N pada sekitar 3 mm sebelum menunjukkan kekakuan negatif.
Selama pengenalan tulisan tangan, variasi dalam gaya dan kecepatan menulis terjadi di antara pengguna yang berbeda. Untuk mengevaluasi kemampuan metamaterial origami yang kami rancang untuk mengenali perbedaan karakteristik ini, satu generator piezoelektrik origami Kresling dikenakan enam siklus kompresi pada kecepatan dan jarak kompresi yang berbeda. Jarak kompresi adalah 3, 5, 15, dan 20 mm, dan kecepatan kompresi masing-masing adalah 30, 40, dan 50 mm/menit. Ekstrak tegangan absolut maksimum selama proses kompresi sebagai fitur sinyal untuk analisis stabilitas (Gambar 2c ). Dapat diamati bahwa di bawah jarak kompresi konstan, tegangan maksimum terpengaruh secara minimal, sementara kecepatan kompresi menunjukkan korelasi positif dengan tegangan maksimum. Dan saat jarak kompresi meningkat, stabilitas tegangan maksimum menurun. Gambar 2d–f menunjukkan sinyal keluaran generator origami di bawah kondisi kompresi yang berbeda, yang menunjukkan bahwa sinyal tegangan dengan cepat mencapai puncaknya selama satu siklus kompresi, sebagian besar sinkron dengan sinyal gaya maksimum. Setelah jarak kompresi melampaui gaya puncak, sinyal tegangan menunjukkan tren peluruhan. Patut dicatat bahwa bahkan dalam kondisi kompresi lambat 50 mm/menit, generator piezoelektrik origami Kresling mencapai sinyal tegangan maksimum 0,1 V, yang menunjukkan kinerja keluaran yang baik dan karakteristik sinyal yang khas, sehingga membuatnya menguntungkan untuk aplikasi dalam bidang autentikasi biometrik dan pengenalan lintasan.
2.2 Pengenalan Tulisan Tangan dan Autentikasi Biometrik
Dalam beberapa tahun terakhir, munculnya pembelajaran mesin telah membawa vitalitas baru pada material cerdas dengan kemampuan pemanenan energi di bidang pengenalan biometrik. Di antara semuanya, pengenalan tulisan tangan diterapkan dalam berbagai skenario dan merupakan bagian paling mendasar dan penting dari keamanan informasi. Untuk meningkatkan kemampuan pengenalan informasi pada material mekanis, kami merancang dua bentuk metamaterial origami dengan mengatur empat generator piezoelektrik origami Kresling ke empat titik sudut atau titik pusat dari empat sisi di bawah area pengenalan persegi. Generator tersebut dapat mengirimkan informasi sinyal dari berbagai posisi di dalam area pengenalan, yang memungkinkan perangkat bekerja dengan baik dalam pengenalan biometrik. Perlu disebutkan bahwa kedua perangkat tersebut merupakan struktur simetris putar 90°, dengan lapisan piezoelektrik PVDF yang direkatkan pada sisi luar lipatan gunung origami Kresling. Bantalan rol kerucut dipasang di bawah setiap struktur origami, yang memungkinkan struktur origami berputar bebas selama penekanan perangkat. Lubang-lubang yang dibuka pada permukaan struktur origami Kresling terutama dirancang untuk mencegah kompresi gas di dalam struktur origami agar tidak memengaruhi kinerja film piezoelektrik selama kompresi, dan dampaknya terhadap kinerja pengenalan dapat diabaikan.
Metode khusus untuk mengumpulkan sinyal-sinyal listrik digambarkan dalam Gambar 3a,b , memanfaatkan sistem akuisisi data multisaluran (DH5299D) untuk menangkap sinyal dari empat saluran. Gambar 3c,e , masing-masing, menampilkan sinyal-sinyal dari berbagai huruf yang dikumpulkan dari dua jenis metamaterial origami. Kami mendefinisikan interval waktu penulisan, ditetapkan ke 10 detik, dan berusaha untuk memastikan bahwa waktu mulai dari setiap sinyal tulisan tangan sekonsisten mungkin. Menggunakan frekuensi pengambilan sampel 100 Hz, sinyal-sinyal listrik dari keempat saluran diurutkan secara berurutan berlawanan arah jarum jam untuk menghasilkan sinyal data 40 detik. Untuk setiap metamaterial origami, setiap huruf diulang 30 kali, menghasilkan total 150 set data, dengan 125 set dialokasikan untuk pelatihan dan 25 set untuk pengujian dalam pembelajaran mesin. Setelah melakukan analisis spektral (transformasi Fourier cepat, FFT) pada sinyal yang diperoleh, kami menemukan bahwa komponen spektral dari sinyal tulisan tangan sebagian besar terkonsentrasi di bawah 20 Hz, sementara kontaminasi derau frekuensi tinggi yang signifikan teridentifikasi pada pita frekuensi 50 Hz dan yang lebih tinggi. Untuk mengatasi hal ini, proses penyaringan low-pass dengan frekuensi batas yang sesuai diterapkan untuk mempertahankan karakteristik sinyal penting sekaligus secara efektif meredam komponen derau. (Gambar S3)

Di sini, model SVM digunakan untuk pembelajaran terbimbing (Gambar 3b ). Model ini terutama bertugas membagi berbagai jenis titik data pelatihan menggunakan beberapa hiperbidang dan menunjukkan kinerja yang baik untuk masalah klasifikasi sampel kecil tersebut. Kami menggunakan lib-SVM yang diimplementasikan dalam lingkungan MATLAB untuk pengenalan pola. Untuk kerangka klasifikasi berbasis SVM, skema C-Support Vector Classification (C-SVC) dipilih karena sangat cocok untuk tugas pengenalan kategoris. Pengklasifikasi menggunakan fungsi kernel polinomial orde ke-11, yang menunjukkan kemampuan unggul dalam menangani pemisahan fitur nonlinier dibandingkan dengan kernel linier konvensional. Sebelum pelatihan model, setiap sampel data menjalani praproses sistematis: Semua sinyal mengalami normalisasi 0–1 untuk mengubah skala amplitudonya ke dalam interval [0,1], memastikan keseragaman dimensi di seluruh fitur masukan yang berbeda. Sinyal kemudian diambil sampelnya kembali untuk memastikan konsistensi temporal di seluruh kumpulan data. Alur praproses komprehensif ini secara substansial meningkatkan efisiensi konvergensi dan kinerja klasifikasi model pembelajaran mesin.
Hasil pengenalan, seperti yang ditunjukkan pada Gambar 3d,f , menunjukkan kinerja yang sangat baik dalam mengidentifikasi lima huruf Inggris untuk kedua metamaterial origami, dengan akurasi klasifikasi sebesar 100%.
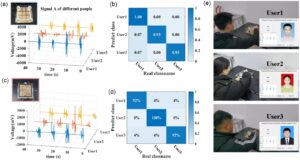
Dalam bidang keamanan informasi, pengenalan perangkat atas identitas pengguna sama pentingnya dengan pengenalan konten. Kami melakukan percobaan tersebut di atas dengan tiga pengguna berbeda pada dua jenis metamaterial origami, mengalokasikan lima perenam data lagi untuk pelatihan menggunakan algoritma SVM. Gambar 4a,c mengilustrasikan sinyal huruf “A” yang ditulis oleh pengguna berbeda yang dikumpulkan dari kedua perangkat. Karena variasi dalam kebiasaan menulis pengguna, faktor-faktor seperti lintasan huruf, kecepatan menulis, akselerasi, dan tekanan berkontribusi pada perbedaan sinyal yang signifikan bahkan untuk huruf yang sama (Gambar 5e ). Gambar 4b,d menyajikan hasil pengenalan identitas. Akurasi pengenalan adalah 95,33% untuk konfigurasi sudut dan 94,67% untuk konfigurasi tepi. Kedua metamaterial origami menunjukkan kinerja yang sangat baik dalam pengenalan identitas, tanpa perbedaan signifikan yang diamati.

Lebih jauh lagi, metamaterial yang terinspirasi origami yang kami rancang menunjukkan aplikasi biomedis yang potensial dalam pengenalan biometrik, khususnya untuk pemantauan perkembangan penyakit Parkinson (PD). PD terutama bermanifestasi sebagai disfungsi motorik yang ditandai dengan tremor saat istirahat, kekakuan otot, dan bradikinesia. Sensor tekanan fleksibel berbasis triboelektrik saat ini dapat mendeteksi perkembangan PD dengan memantau variasi voltase yang disebabkan oleh getaran otot [ 34 , 35 ]. Khususnya, metamaterial origami piezoelektrik kami menunjukkan sensitivitas yang ditingkatkan terhadap informasi getaran, yang memungkinkan ekstraksi fitur sinyal yang unggul dari osilasi mekanis. Kemajuan teknologi ini menjanjikan untuk memungkinkan diferensiasi diagnostik yang lebih bernuansa dan bantuan rehabilitasi yang lebih baik dalam manajemen gangguan neurologis, yang berpotensi mengatasi keterbatasan resolusi yang melekat dalam metodologi deteksi getaran konvensional.
2.3 Pelacakan Lintasan Berbasis Pengenalan Grid
Metode klasifikasi yang disebutkan sebelumnya memang menghasilkan hasil pengenalan yang baik, tetapi memiliki keterbatasan dalam hal cakupan pengenalan pengguna. Bagi desainer, jumlah set data pelatihan yang diperlukan untuk pengenalan terlalu besar, yang juga merupakan masalah umum yang dihadapi oleh sebagian besar perangkat pengenalan berbasis metamaterial. Di sini, kami mengusulkan solusi: pertama, buat kisi area pengenalan dan buat pengenalan untuk titik kisi. Kemudian, berdasarkan ini, hubungkan titik kisi yang berbeda dalam urutan kronologis untuk menyelesaikan pengenalan lintasan tulisan tangan. Karena metamaterial origami yang dirancang sensitif terhadap sinyal getaran dan mempertimbangkan kebiasaan menulis yang berbeda, kami menggunakan dua metode menggambar untuk menggambarkan lintasan gerakan pada metamaterial origami: satu melibatkan getaran vertikal pada permukaan, dan yang lainnya melibatkan geseran sejajar dengan permukaan.
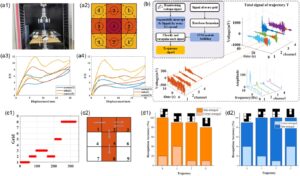
Bahasa Indonesia: Untuk mencapai pengenalan titik grid dari lintasan tulisan tangan, kami membagi area penulisan menjadi 9 titik grid dan menomori mereka secara berurutan. Di setiap area titik grid, kami mengambil sampel sinyal listrik pada frekuensi 10.000 Hz selama durasi 5 detik sebagai sinyal pengenalan panjang satuan, diulang 153 kali. Karena komponen sinyal getaran selama menggambar relatif seragam, mengubah sinyal dari domain waktu ke domain frekuensi dapat lebih baik membedakan karakteristik sinyal dari posisi yang berbeda. Selain itu, karena frekuensi getaran selama menulis sebagian besar di bawah 10 Hz, kami menggabungkan sinyal domain frekuensi dari empat saluran secara berurutan sebagai sinyal pengenalan (Gambar 5a1–a4 ). 90 set sinyal pengenalan digunakan sebagai set pengujian, sedangkan 1287 set sinyal yang tersisa digunakan sebagai set pelatihan, yang kemudian dimasukkan ke dalam model SVM untuk pelatihan. Dengan membandingkan gambar analisis komponen utama (PCA) dari sinyal yang dihasilkan oleh dua jenis metamaterial origami (Gambar 5b1–b4 ), terlihat jelas bahwa metamaterial origami dengan konfigurasi tepi lebih baik mencerminkan perbedaan antara sinyal dari titik grid yang berbeda dibandingkan dengan metamaterial origami dengan konfigurasi sudut, sehingga sedikit mengungguli dalam pengenalan klasifikasi titik grid. Hasilnya menunjukkan bahwa kedua jenis metamaterial origami menunjukkan kinerja yang baik dalam pengenalan titik grid untuk dua metode menggambar lintasan, dengan akurasi pengenalan sebesar 97,78% untuk metamaterial origami dengan konfigurasi sudut (Gambar 5c1,c2 ) dan 100% untuk metamaterial origami dengan konfigurasi tepi (Gambar 5c3,c4 ). Melalui PCA untuk reduksi dimensionalitas sinyal, perbedaan antara sembilan sinyal titik grid dapat diamati secara lebih intuitif.
Untuk menjelaskan perbedaan dalam pengenalan titik grid antara dua jenis metamaterial origami, kami melakukan eksperimen kompresi pada mereka menggunakan mesin pengujian material (Gambar 6a1 ). Mempertimbangkan simetri struktur, kami mengkategorikan titik grid menjadi tiga jenis: titik grid tengah, titik grid tepi, dan titik grid sudut (Gambar 6a2 ). Gambar 6a3,a4 , masing-masing, menggambarkan besarnya gaya dukungan yang dihasilkan oleh metamaterial selama kompresi seragam pada 50 mm/menit. Menurut efek piezoelektrik positif, sinyal tegangan piezoelektrik berkorelasi positif dengan tegangan yang diterapkan pada film piezoelektrik. Dengan demikian, semakin besar perbedaan dalam kinerja mekanis metamaterial origami selama kompresi tiga jenis titik grid, semakin baik kinerja klasifikasi mereka untuk tiga jenis titik grid. Memilih nilai maksimum kurva gaya-perpindahan sebagai fitur selama kompresi berbagai jenis titik grid, kami menggunakan varians sampel untuk menunjukkan tingkat dispersi data antara berbagai jenis titik grid. Varians sampel untuk metamaterial origami dengan konfigurasi sudut adalah 3,60, sedangkan untuk metamaterial origami dengan konfigurasi tepi, adalah 10,15. Varians sampel yang lebih besar menunjukkan perbedaan yang lebih signifikan dalam fitur antara tiga jenis titik grid, dan juga menunjukkan bahwa metamaterial origami dengan konfigurasi tepi lebih baik mencerminkan perbedaan antara sinyal dari titik grid yang berbeda dibandingkan dengan metamaterial origami dengan konfigurasi sudut.
Dalam kehidupan sehari-hari, tulisan tangan dan rute kendaraan mewakili lintasan sinyal yang berkesinambungan. Untuk pengenalan sinyal lintasan tersebut, berdasarkan klasifikasi titik grid yang dicapai melalui metamaterial origami, kita perlu mendiskritisasikannya untuk memungkinkan pelacakan dan pengenalan pada metamaterial origami. Di sini, kami menggunakan pendekatan windowing untuk mengelompokkan sinyal lintasan lengkap yang dikumpulkan untuk pengenalan per segmen (Gambar 6b ). Setiap kali, sinyal pengenalan satuan panjang diekstraksi, dan untuk mempertahankan kesinambungan lintasan, jendela dipindahkan setiap 0,1 detik. Setelah mengubah sinyal domain waktu yang tersegmentasi menjadi domain frekuensi untuk pengenalan, dengan mengambil lintasan huruf “T” sebagai contoh, hasil pengenalan pada metamaterial origami yang dikonfigurasi tepi menggunakan metode penggambaran lintasan geser ditunjukkan pada Gambar 6c . Pada kedua jenis metamaterial origami, kami mengulangi pengenalan untuk huruf S, J, T, U menggunakan getaran permukaan vertikal dan geseran permukaan paralel masing-masing sepuluh kali untuk pengenalan lintasan. Akurasi pengenalan yang diperoleh ditunjukkan pada Gambar 6d1,d2 .
Hasilnya menunjukkan bahwa metamaterial origami dengan konfigurasi tepi secara signifikan mengungguli metamaterial origami dengan konfigurasi sudut dalam pengenalan lintasan. Sebagian alasannya adalah bahwa selama pengenalan lintasan, perbedaan sinyal antara titik kisi tepi dan titik kisi sudut dari metamaterial origami dengan konfigurasi sudut tidak cukup jelas. Faktor lainnya adalah bahwa setiap sinyal lintasan berisi ratusan klasifikasi titik kisi, dan perbedaan kecil dalam akurasi pengenalan diperkuat selama sejumlah besar contoh pengenalan. Sebaliknya, karena perbedaan yang jelas dalam sinyal antara tiga jenis titik kisi untuk metamaterial origami dengan konfigurasi tepi, akurasi pengenalan klasifikasi adalah 100%. Oleh karena itu, terlepas dari metode penggambaran, akurasi pengenalan lintasan dari metamaterial origami dengan konfigurasi tepi di atas 90%.
Perlu disebutkan bahwa berdasarkan hasil eksperimen, kedua metode penggambaran tidak memiliki dampak signifikan pada pengenalan titik grid atau pengenalan lintasan. Hal ini karena perbedaan terbesar antara kedua metode penggambaran terletak pada amplitudo sinyal listrik yang dihasilkan. Namun, nilai frekuensinya memiliki perbedaan kecil, dan selama pemrosesan sinyal, normalisasi diterapkan pada amplitudo untuk melemahkan pengaruh faktor-faktor seperti tekanan dan kecepatan pada pengenalan posisi titik grid saat ini. Oleh karena itu, metode pemrosesan ini tidak sensitif terhadap kebiasaan menulis, dan pengenalan lintasan hanya sedikit terpengaruh oleh kebiasaan menulis.
3 Kesimpulan
Dalam masyarakat saat ini dengan adopsi IoT yang meluas, ada permintaan yang meningkat untuk kecerdasan perangkat dan keamanan informasi. Kami telah merancang dua jenis metamaterial origami dan membahas aplikasinya dalam autentikasi biometrik dan pengenalan lintasan. Berdasarkan struktur Kresling, metamaterial origami menunjukkan respons yang baik terhadap informasi seperti gaya dan kecepatan. Menggabungkan beberapa generator piezoelektrik origami meningkatkan kemampuan mereka untuk mengumpulkan informasi multidimensi. Dengan menggunakan model SVM, kedua jenis metamaterial origami menunjukkan kinerja klasifikasi yang sangat baik dalam klasifikasi konten tulisan tangan dan pengenalan identitas, dengan tingkat akurasi 100% untuk pengenalan huruf dan lebih dari 95% untuk pengenalan identitas. Lebih jauh lagi, kombinasi beberapa saluran memberi metamaterial origami kemampuan pengenalan lintasan, menawarkan kemungkinan baru untuk pengenalan lintasan menggunakan satu perangkat. Metamaterial origami yang dikonfigurasi sudut berkinerja buruk dalam pengenalan lintasan, sedangkan metamaterial origami yang dikonfigurasi tepi menunjukkan sensitivitas yang lebih besar terhadap informasi posisi, mencapai akurasi pengenalan 90% dan 97,5% untuk dua metode menggambar, masing-masing. Kedua jenis metamaterial origami menunjukkan kinerja yang sangat baik dalam autentikasi biometrik, dan paradigma desain ini memiliki potensi aplikasi yang signifikan dalam berbagai skenario seperti papan sentuh dan papan tulisan tangan dalam interaksi manusia–komputer serta lantai pintar di gedung dan jalan.